

Faster motor drive parameters for high-end mechatronics
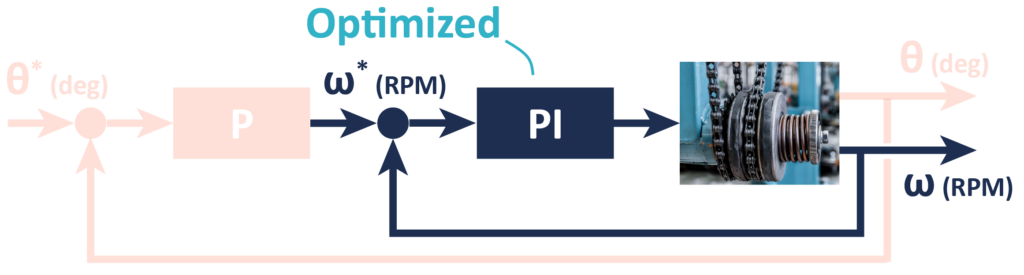
Industrial motor drives, from the cutting-edge SynRM to legacy induction motor, and many intermediate technologies, traditionally rely on a cascade control structure with multiple interlinked control loops. At the structure’s heart, the speed control loop plays a crucial and stabilizing role. Consequently, a finely tuned motor drive — particularly the PI controller within the speed control loop — ensures a safe, vibration-free drivetrain. Moreover, a well-adjusted dynamic controller is necessary to fully exploit potential benefits, such as trajectory optimization. In summary, given the importance of the speed controller, parameter selection is far too critical for a trial-and-error approach.
The eMotionizer tool is setting new standards in motor drive tuning, offering users two rule-based methods for calculating speed control loop parameters based on a straightforward experiment. Unlike the ‘autotune’ functions found on some commercial drives, these methods promise not only rapid results but also a higher level of precision and reliability. The eMotionizer features a streamlined interface and step-by-step instructional videos, allowing users—even those with no background in control engineering or optimization techniques—to achieve professional-grade tuning with ease.
“The eMotionizer tool is setting new standards in motor drive tuning”
To date, the eMotionizer has already been put to the test on several projects, including fine-tuning the P & I control parameters of a mockup harbor crane’s speed controller while benchmarking against the drive’s standard autotune function. As shown in this video, the new parameter values—complimented with an additional filter—deliver a notable boost in performance, reducing vibrations significantly.
System identification for the win
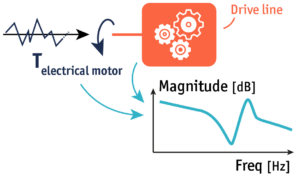
The secret to the eMotionizer’s drive line parameter optimizations? An approach hinging on a simple yet powerful experiment, accessible to any drive user. This straightforward test captures a detailed “signature” of the connected mechanism in the frequency domain, providing valuable insights into its stability and dynamic behaviour. With this unique signature, control parameters for optimal performance can be calculated. Crucially, the data gathered in this experiment offers no clues for reconstructing the mechanism’s mechanical design, ensuring complete protection against intellectual property risks.
Notch, or not to notch?
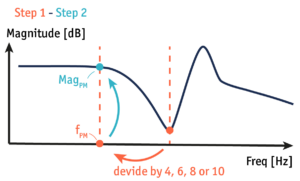
One of the destabilizing factors in a drivetrain is traditionally the frequency at which the entire system resonates. This frequency typically limits the control dynamics and can cause vibrations when not countered adequately. For 90% of drivetrains, the focus is primarily on tuning both fast and robust, while high-end dynamics are secondary. For these systems, it is often sufficient to set the PI controller using a method we refer to as the anti-resonance method. However, to improve dynamics, the remaining 10% of drivetrains require an approach that incorporates an additional filter in the speed control loop—a notch filter—to suppress unwanted resonances. The eMotionizer complements this with an advanced tuning method based on a safety phase margin the user must choose himself. While this method is somewhat more complex and may require iterations, it consistently results in the best control performance.
Doctoral research focussing on Motor Drive control loop Optimization:
- Garces, S. R., Ben Yahya, A., Van Oosterwyck, N., Jacques, D., & Derammelaere, S. (2022). Bode-based speed proportional integral and notch filter tuning of a permanent magnet synchronous machine-driven flexible system. In 2022 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) (pp. 783–788). Sapporo, Japan. dio: 10.1109/AIM52237.2022.9863324