

CAM Motion Profile Optimization for simple machines
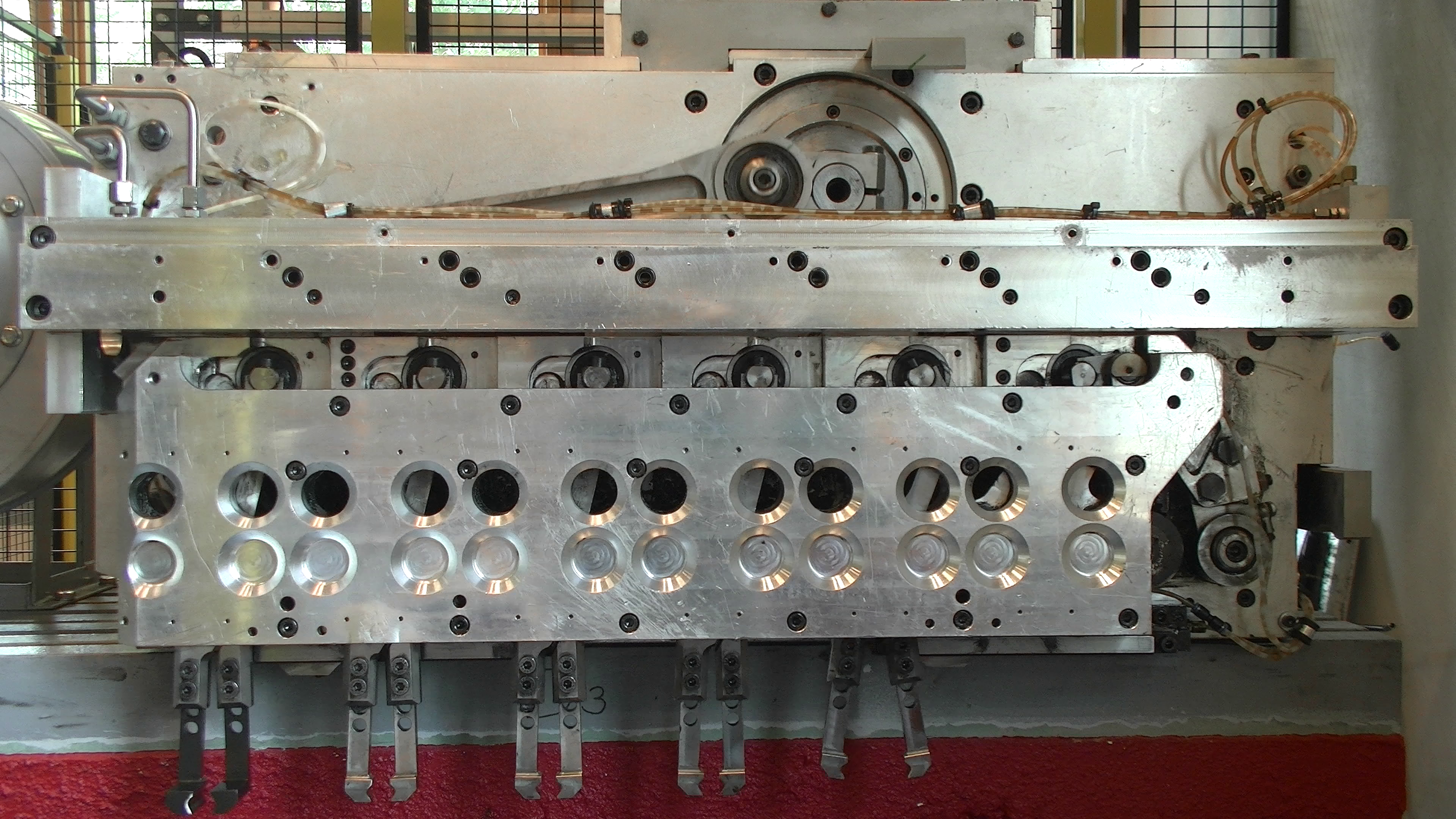
In modern industry, machinery often relies on complex drive lines, many of which don’t simply rotate but instead perform a periodic back-and-forth motion. Imagine a simple mechanism like a belt-powered slide track that picks up an item at point A and drops it off at point B or the machine shown in the image below. Typically, these mechanisms operate in a defined manner at each endpoint, e.g., remaining stationary for some time. The timing between these two points, A & B, is usually dictated by the production process. But what happens in between — how quickly or slowly the carriage moves — is often left undefined.
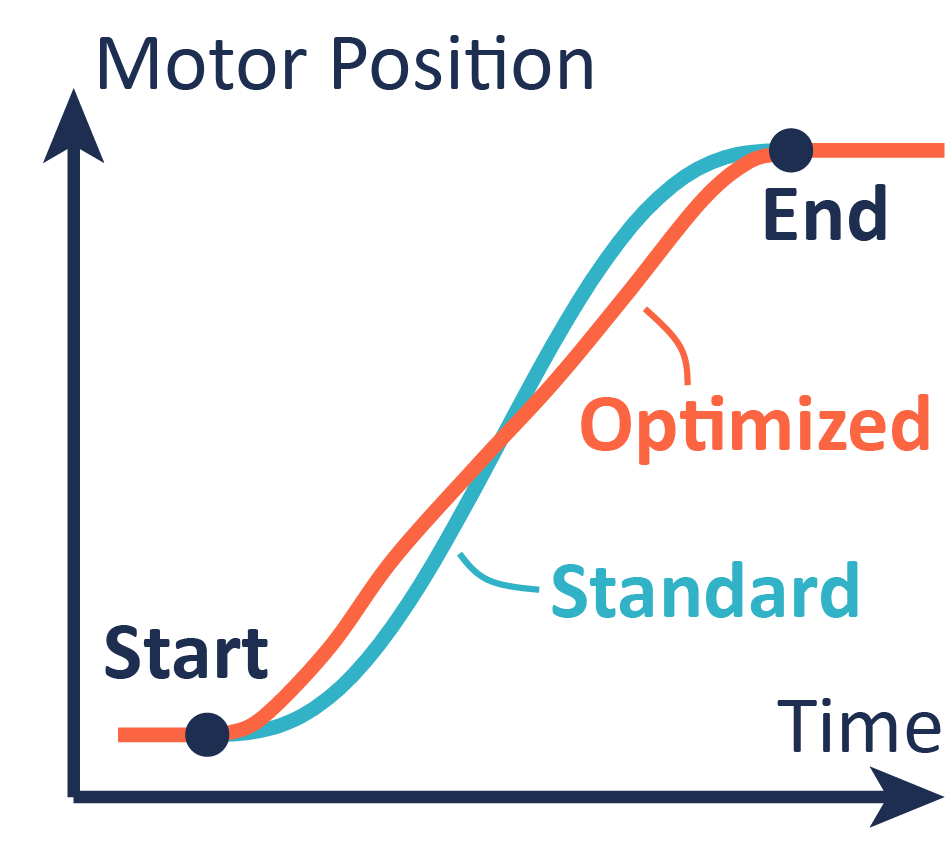
This undefinedness between points A and B offers manufacturers a valuable opportunity: the intermediate phases of machine operation can be optimized, e.g., to reduce energy consumption or limit the size of the required electric motor. A well-chosen CAM motion profile can make a machine not only more energy-efficient and cost-effective but also capable of faster production or an extended operational lifespan. In many cases, a combination of these advantages can be realized, making optimized motion profiles an essential tool for boosting both performance and sustainability in industrial machinery.
“The eMotionizer has proven to be a game-changer in optimizing CAM motion trajectories”
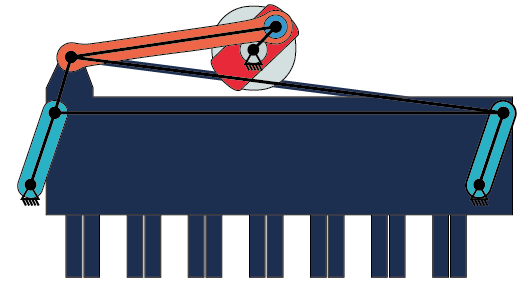
The eMotionizer has proven to be a game-changer in optimizing the CAM motion trajectory. Using the tool, e.g., the CAM motion trajectory of a 4-bar mechanism was enhanced, achieving a 63% reduction in energy consumption compared to the machine builder’s original motion path. Moreover, the optimization also reduced internal machine vibrations, leading to a noticeably quieter machine with an extended lifespan.
A virtual machine model
Nevertheless, optimizing a motion trajectory is a complex challenge that requires more than just a solid optimization principle; it hinges on a precise virtual machine model capable of quickly simulating the machine’s behavior. This modeling enables rapid testing of various scenarios and making informed comparisons.
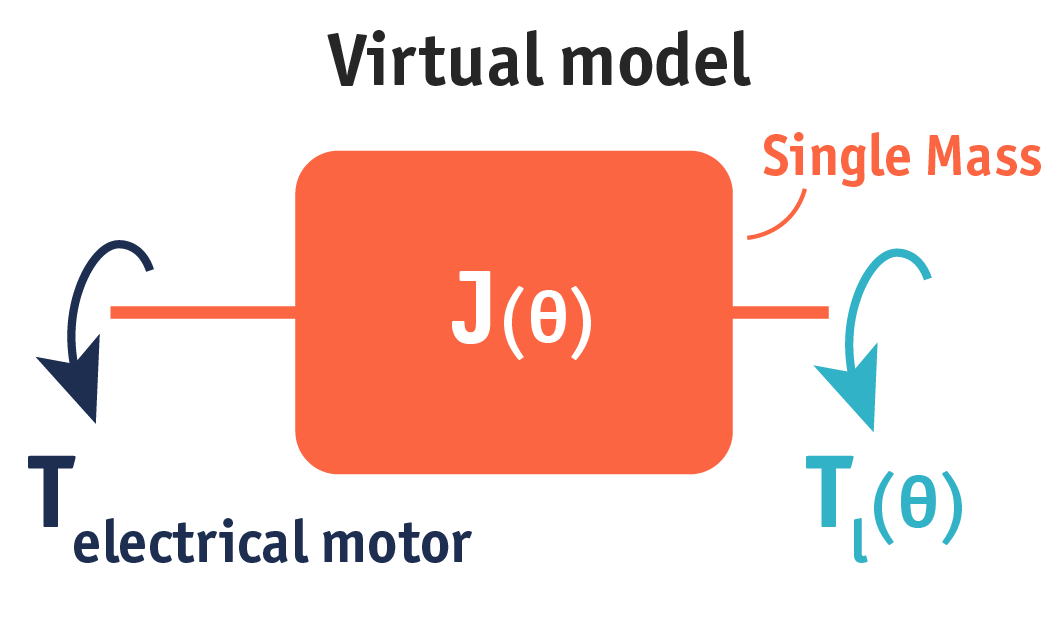
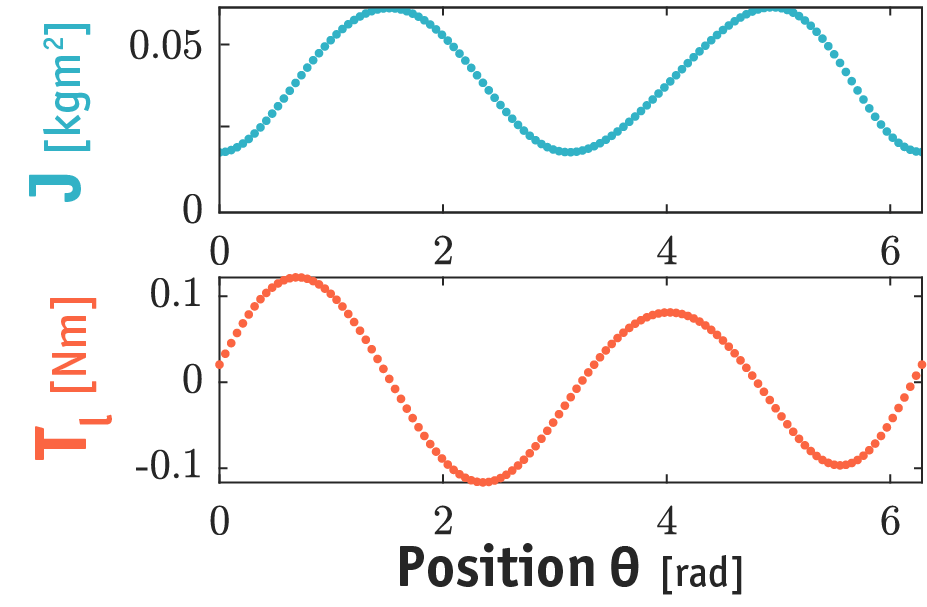
The eMotionizer relies on a basic virtual model consisting of a single mass to optimize a CAM motion profile. This mass is controlled by the torque generated by the electric motor and countered by what we call the ‘load torque’. An inertia value is assigned to the rotating mass. In complex machines, this inertia value is often not constant but variable based on the machine’s position. The load torque represents all external forces acting on the mechanism, along with the gravitational effects on the various machine components. In the end, this load torque will also depend on the machine’s position for more complex setups.
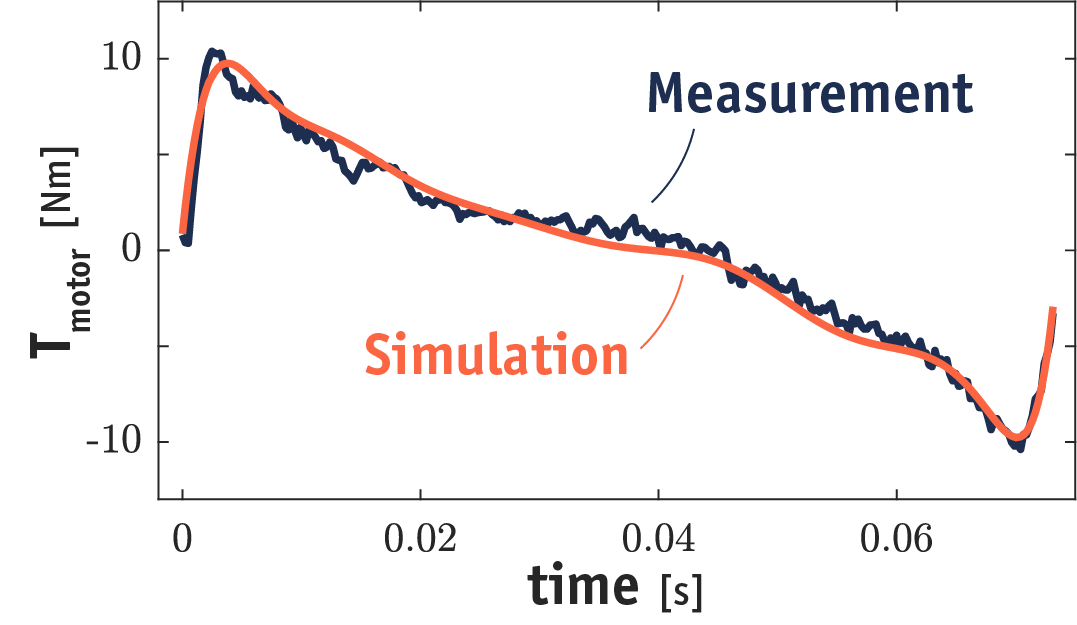
Determining the properties of this simple virtual model (the mechanical system characteristics) can be done analytically or through three basic motion simulations in CAD software. Using this approach, the virtual model will eventually predict the machine’s behavior almost perfectly. The image below illustrates that, e.g., for the machine above, the match between the simulated and actual measured torque is practically perfect. Moreover, it is impossible to reverse-engineer the original CAD design from the virtual model properties, which is a major benefit of using the eMotionizer. The eMotionizer’s method is thus intellectual property safe, not revealing any sensitive company secrets.
State-of-the-art optimization techniques
Of course, a robust optimization method is essential in addition to a solid virtual model. The secret of the eMotionizer optimizations is state-of-the-art doctoral research that both improves simulation stability and significantly reduces optimization time. As a result, the optimization outcome is delivered almost instantly. Although the website does not yet allow it, in principle, a new trajectory could be recalculated on the fly.
Doctoral research focusing on CAM Motion Profile Optimization:
- Van Oosterwyck, N. et al. (2022) ‘Energy optimal point-to-point motion profile optimization’, Mechanics Based Design of Structures and Machines, 52(1), pp. 239–256. doi: 10.1080/15397734.2022.2106241.
- Van Oosterwyck, N., Yahya, A.B., Cuyt, A. & Derammelaere, S. 2020, ‘CAD Based Trajectory Optimization of PTP Motions using Chebyshev Polynomials’, 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, pp. 403-408. doi: 10.1109/AIM43001.2020.9158893.
This research was funded by the Research Foundation Flanders (FWO) via a PhD grant [1S88120N] and a senior research project fundamental research grant [G0B1123N].